 English
English Español
Español  Português
Português  русский
русский  Français
Français  日本語
日本語  Deutsch
Deutsch  tiếng Việt
tiếng Việt  Italiano
Italiano  Nederlands
Nederlands  ภาษาไทย
ภาษาไทย  Polski
Polski  한국어
한국어  Svenska
Svenska  magyar
magyar  Malay
Malay  বাংলা ভাষার
বাংলা ভাষার  Dansk
Dansk  Suomi
Suomi  हिन्दी
हिन्दी  Pilipino
Pilipino  Türkçe
Türkçe  Gaeilge
Gaeilge  العربية
العربية  Indonesia
Indonesia  Norsk
Norsk  تمل
تمل  český
český  ελληνικά
ελληνικά  український
український  Javanese
Javanese  فارسی
فارسی  தமிழ்
தமிழ்  తెలుగు
తెలుగు  नेपाली
नेपाली  Burmese
Burmese  български
български  ລາວ
ລາວ  Latine
Latine  Қазақша
Қазақша  Euskal
Euskal  Azərbaycan
Azərbaycan  Slovenský jazyk
Slovenský jazyk  Македонски
Македонски  Lietuvos
Lietuvos  Eesti Keel
Eesti Keel  Română
Română  Slovenski
Slovenski  मराठी
मराठी  Srpski језик
Srpski језик


ຜະລິດຕະພັນ






Beam Flippers
Beam flippers ເປັນອຸປະກອນປະສິດທິພາບສູງໃນສາຍໃນການຜະລິດ beam ກ່ອງ, ທີ່ຜະລິດໂດຍ JINFENG WELDCUT ຜູ້ທີ່ເປັນຜູ້ຜະລິດຈີນມືອາຊີບແລະຜູ້ສະຫນອງ Beam flippers ທີ່ມີລາຄາທີ່ເຫມາະສົມ. The Beam flippers ສະຫນອງຄວາມປອດໄພຫຼາຍແລະປະສິດທິພາບສູງສໍາລັບການຍ້າຍ beams ແລະ overturning beams ສໍາລັບການຜະລິດ Box beams.
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
JINFENG WELDCUT ຈະສະຫນອງການຮັບປະກັນ 1 ປີສໍາລັບການBeam flippers. ອົງປະກອບໄຟຟ້າຫຼັກຂອງສາຍການຜະລິດເຄື່ອງ beam ກ່ອງຖືກເລືອກຈາກຍີ່ຫໍ້ທີ່ມີຊື່ສຽງຂອງໂລກທີ່ຈະນໍາເອົາຄວາມສະດວກສະບາຍຫຼາຍຂຶ້ນສໍາລັບຜູ້ໃຊ້ເພື່ອຊອກຫາຊິ້ນສ່ວນຢູ່ໃນທ້ອງຖິ່ນໂດຍບໍ່ໄດ້ມາຈາກທາງໄກຈາກປະເທດຈີນ. ໄດ້Beam flippersແມ່ນອຸປະກອນທີ່ທັນສະໄໝ ແລະ ມີປະສິດທິພາບສູງ ເພື່ອເພີ່ມສະມັດຕະພາບໃຫ້ແກ່ຜູ້ໃຊ້ງານຈາກໂຄງສ້າງເຫຼັກ, ການກໍ່ສ້າງເຫຼັກກ້າ ແລະ ອາຄານສູງ.




ມຸມເບິ່ງໂຄງສ້າງ
ການນຳໃຊ້ອຸປະກອນ
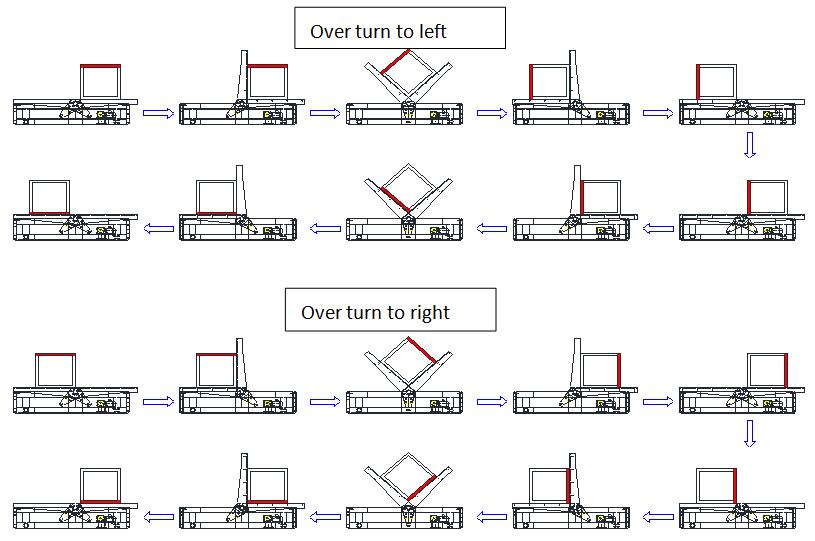
ສອງ pcs ຂອງ movable 180 °ບົບໄຮໂດຼລິກbeam flippersໄດ້ຖືກສະຫນອງໃຫ້ໃນແຕ່ລະຊຸດ, ສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການຫັນຫນ້າວຽກຫຼາຍກວ່າການເຊື່ອມໂລຫະໃນດ້ານຫນຶ່ງ. ເມື່ອເຮັດວຽກ, ຍົກ workpiece ອອກຫ່າງຈາກຕາຕະລາງ roller ຫຼື rack workpiece, ແລະ reducer ຂັບສອງວົງເລັບ overturning ເພື່ອຍ້າຍ synchronously ເພື່ອຍ້າຍ workpiece ໄປຂ້າງຂອງຕາຕະລາງ roller ຫຼື rack workpiece ໄດ້. ຫຼັງຈາກນັ້ນ, ສອງກະບອກໄຮໂດຼລິກຂັບລົດສອງແຂນທີ່ມີຮູບຊົງຕົວ L ເພື່ອ rotate synchronously. ຫຼັງຈາກ workpiece ຖືກ overturned, ມັນຖືກຍ້າຍໄປຢູ່ກາງຂອງຕາຕະລາງ roller ຫຼື rack workpiece, ແລະຫຼັງຈາກນັ້ນ workpiece ໄດ້ຖືກຂົນສົ່ງໄປຂະບວນການຕໍ່ໄປຫຼືການເຊື່ອມໂລຫະ.
ຕົວກໍານົດການດ້ານວິຊາການຫຼັກ
|
1 |
ນ້ຳໜັກຊິ້ນວຽກ |
≤30ທ |
|
2 |
ພະລັງງານມໍເຕີເດີນທາງ |
1.5×2×3.0kW |
|
3 |
ຄວາມໄວໃນການຍ່າງ |
6 ແມັດ/ນທ |
|
4 |
ຄວາມກົດດັນສະຖານີໄຮໂດຼລິກ |
ສູງສຸດ 16 Mpa |
|
5 |
ໄລຍະທາງສູນກາງລົດໄຟ |
900 ມມ |
ລັກສະນະການປະຕິບັດ
ອຸປະກອນດັ່ງກ່າວປະກອບດ້ວຍເຄື່ອງຈັກຕົ້ນຕໍ, ລະບົບໄຮໂດຼລິກ, ແລະລະບົບຄວບຄຸມໄຟຟ້າ. ກຸ່ມຂອງສອງbeam flippersຖືກນໍາໃຊ້ເພື່ອ overturn ແລະຍ້າຍພ້ອມໆກັນ. ຂະບວນການ flipping ຂອງທັງສອງbeam flippersຖືກຄວບຄຸມໂດຍປ່ຽງ synchronization ໄຮໂດຼລິກແບບພິເສດເພື່ອຮັບປະກັນການຫມຸນ synchronous ຂອງແຕ່ລະແຂນ overturning ໃນລະຫວ່າງການຂະບວນການ tilting. ຄວບຄຸມຂັ້ນຕອນການຫັນປ່ຽນຂອງ workpiece ດ້ວຍຕົນເອງເພື່ອບັນລຸ 90 ° turnover ຂອງ workpiece ໄດ້.
3.2 ແຕ່ລະbeam flippersໃຊ້ຊຸດຂອງກະບອກສູບວິສະວະກໍາໄຮໂດຼລິກມາດຕະຖານເພື່ອຊຸກດັນໃຫ້ແຂນຫມຸນປະເພດ "L" ເພື່ອຫມຸນ, ເຊິ່ງສາມາດຫັນຫນ້າວຽກໄດ້. ຕົວຫຼຸດຄວາມໄວ ແລະ ລໍ້ຍ່າງຖືກຈັດໃສ່ໃນວົງເລັບ turnover, ເຮັດໃຫ້ວົງເລັບ turnover ມີການເຄື່ອນໄຫວ.
3.3 ອຸປະກອນຕ້ອງໄດ້ຮັບການຂັບເຄື່ອນດ້ວຍລະບົບໄຮໂດຼລິກແລະມີຄຸນລັກສະນະຂອງການຕໍ່ຕ້ານຜົນກະທົບ, ການ overturn ທີ່ຫມັ້ນຄົງ, ແລະອັດຕາການລົ້ມເຫຼວຕ່ໍາເມື່ອທຽບກັບເຄື່ອງຈັກ overturning ຂັບເຄື່ອນດ້ວຍກົນຈັກ. ມັນບໍ່ພຽງແຕ່ສາມາດນໍາໃຊ້ເພື່ອ flip workpiece 90 º, ແຕ່ຍັງສາມາດໄດ້ຮັບການຍົກເພື່ອຍ້າຍລະຫວ່າງສະຖານີທີ່ແຕກຕ່າງກັນ. ເມື່ອປຽບທຽບກັບເຄື່ອງຈັກໃນລະບົບຕ່ອງໂສ້ແບບດັ້ງເດີມ, ບໍ່ພຽງແຕ່ສະຖານີເຮັດວຽກບໍ່ປິດ, ອໍານວຍຄວາມສະດວກໃນການຍົກແລະການຂົນສົ່ງຂອງ workpiece ໃນແລະອອກ, ແຕ່ຍັງຂະຫນາດໂດຍລວມ, ໂດຍສະເພາະຂະຫນາດຄວາມສູງ, ຫຼຸດລົງຢ່າງຫຼວງຫຼາຍ, ແລະການດໍາເນີນງານແມ່ນປອດໄພແລະເຊື່ອຖືໄດ້. ກຸ່ມຫນຶ່ງຂອງສອງຊຸດຂອງການຄວບຄຸມການເຊື່ອມໂຍງ, ງ່າຍຕໍ່ການປະຕິບັດງານ, ປອດໄພແລະເຊື່ອຖືໄດ້.
Beam flippers ຕິດຕັ້ງຢູ່ໃນໂຮງງານຂອງຜູ້ໃຊ້
Hot Tags: Beam Flippers, ຈີນ, ຜູ້ຜະລິດ, ຜູ້ສະຫນອງ, ຂາຍສົ່ງ, ໂຮງງານຜະລິດ, Customized, Made in China, Price, Quality, ECA
ປະເພດທີ່ກ່ຽວຂ້ອງ
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.









X
ພວກເຮົາໃຊ້ cookies ເພື່ອສະເຫນີໃຫ້ທ່ານມີປະສົບການການຊອກຫາທີ່ດີກວ່າ, ວິເຄາະການເຂົ້າຊົມເວັບໄຊທ໌ແລະປັບແຕ່ງເນື້ອຫາ. ໂດຍການນໍາໃຊ້ເວັບໄຊທ໌ນີ້, ທ່ານຕົກລົງເຫັນດີກັບການນໍາໃຊ້ cookies ຂອງພວກເຮົາ.
ນະໂຍບາຍຄວາມເປັນສ່ວນຕົວ